

بحيرة واحدة، USV صغير واحد، 250,000 متر مربع من الأسرار
تلعب البحيرات الحضرية دورًا حيويًا في المدن الحديثة، حيث تساهم في التحكم في الفيضانات، وتغذية المياه الجوفية، وجودة المياه، والجماليات الحضرية. مع تكثيف التنمية الحضرية حول هذه البحيرات، يصبح الحصول على بيانات طوبوغرافية دقيقة تحت الماء أمرًا حيويًا للتصميم الهندسي والإدارة البيئية.
توضح دراسة الحالة هذه كيف تم نشر طائرة iBoat BS12 USV التي تعمل بنظام Android من Hi-Target لإجراء مسح طوبوغرافي تحت الماء لبحيرة حضرية كبيرة في بانكوك، تايلاند. يسلط المشروع الضوء على كفاءة الطائرة USV وقدرتها على التكيف وملاءمتها للمياه الداخلية المعقدة والمحصورة.
التحديات في مسح البحيرات الحضرية
في المناطق الحضرية الكثيفة مثل بانكوك، تمثل أساليب المسح الطبوغرافي التقليدية تحت الماء باستخدام القوارب المأهولة عدة قيود:
· وصول مقيد: الشواطئ المزدحمة ومداخل المياه الضيقة تجعل من الصعب إطلاق القوارب بالحجم الكامل والمناورة بها.
· مخاوف تتعلق بالسلامة: تزيد حركة المشاة الكثيفة والمناطق المحيطة المزدحمة من مخاطر التشغيل.
· فجوات البيانات: قد يتم تفويت المناطق غير المتوفرة أو الضحلة بالقرب من الشواطئ أو التقاطها بشكل سيء.
تسببت هذه القيود في حاجة واضحة إلى حل قياس الأعماق مدمج ومرن وذكي قادر على الوصول إلى المساحات الضيقة دون المساس بجودة البيانات.

الشكل 1. نظرة عامة على موقع المسح
الحل
يعد iBoat BS12 عبارة عن سفينة سطحية خفيفة الوزن وغير مأهولة تعمل بنظام Android، ومصممة خصيصًا لمهام مسح المياه الداخلية. بهيكل أنيق مصنوع من ألياف الكربون والكيفلار، يجمع بين المتانة وقابلية النقل. يسمح حجمه الصغير بنقله في صندوق السيارة وإطلاقه بيد واحدة، مما يجعله مثاليًا للمواقع الحضرية المحصورة.
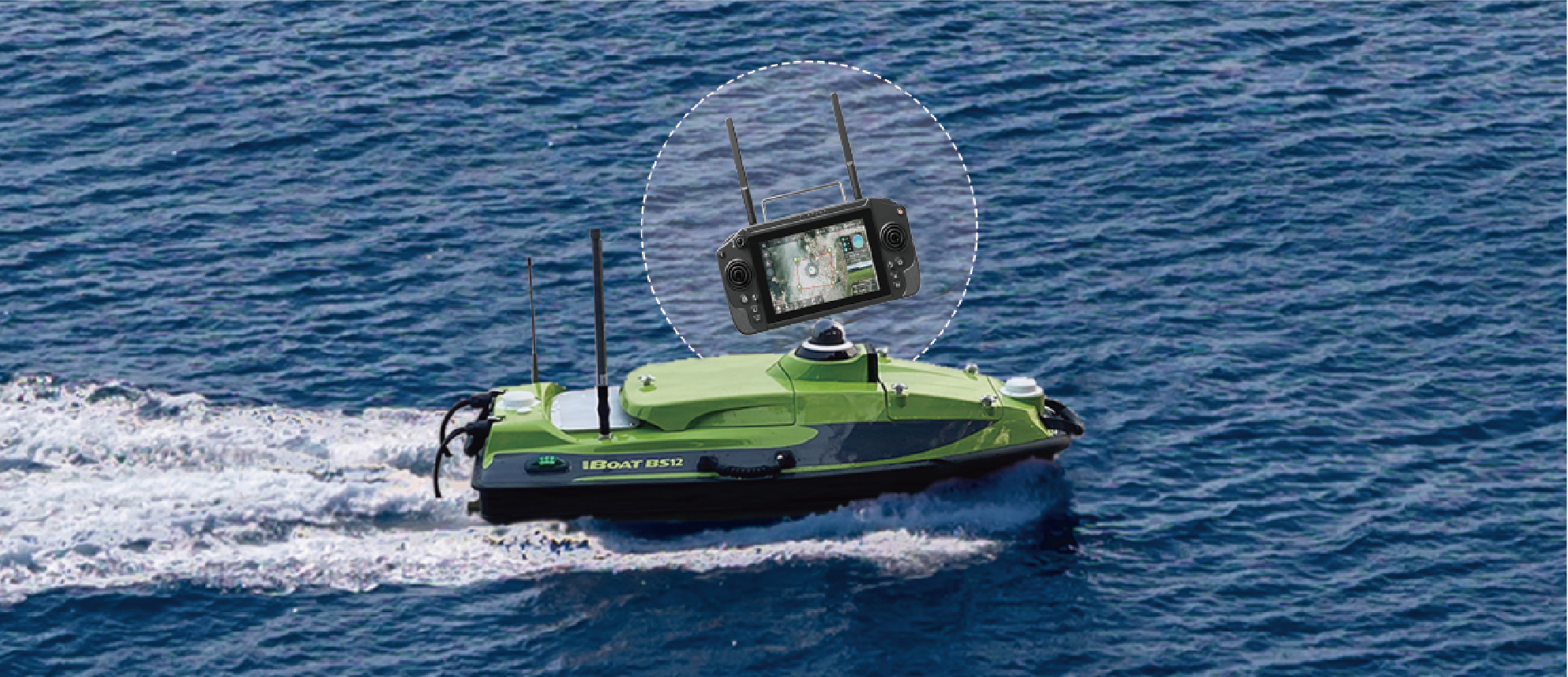
الشكل 2. iBoat BS12: سفينة سطحية متعددة الوظائف تعمل بنظام Android
الميزات الرئيسية:
● الدفع والتصميم: هيكل محسن لـ CFD؛ سرعة قصوى تبلغ 6 م/ث؛ مستقر في المياه العكرة.
● الملاحة: وحدة GNSS + IMU مدمجة تضمن تحديد المواقع بدقة تحت المتر حتى مع إشارات الأقمار الصناعية المتقطعة.
● المستشعرات: جهاز إيكو صوتي أحادي الشعاع مدمج، كاميرا 360 درجة، ورادار مليمترية للكشف عن العوائق.
● نظام التحكم: يتم تشغيله من خلال تطبيق Hi-Survey Boat Android مع أوضاع يدوية أو ذاتية التشغيل بالكامل.
● استمرارية المهمة: يدعم استئناف نقطة التوقف - مثالي للمسوح واسعة النطاق على مدار جلسات متعددة.
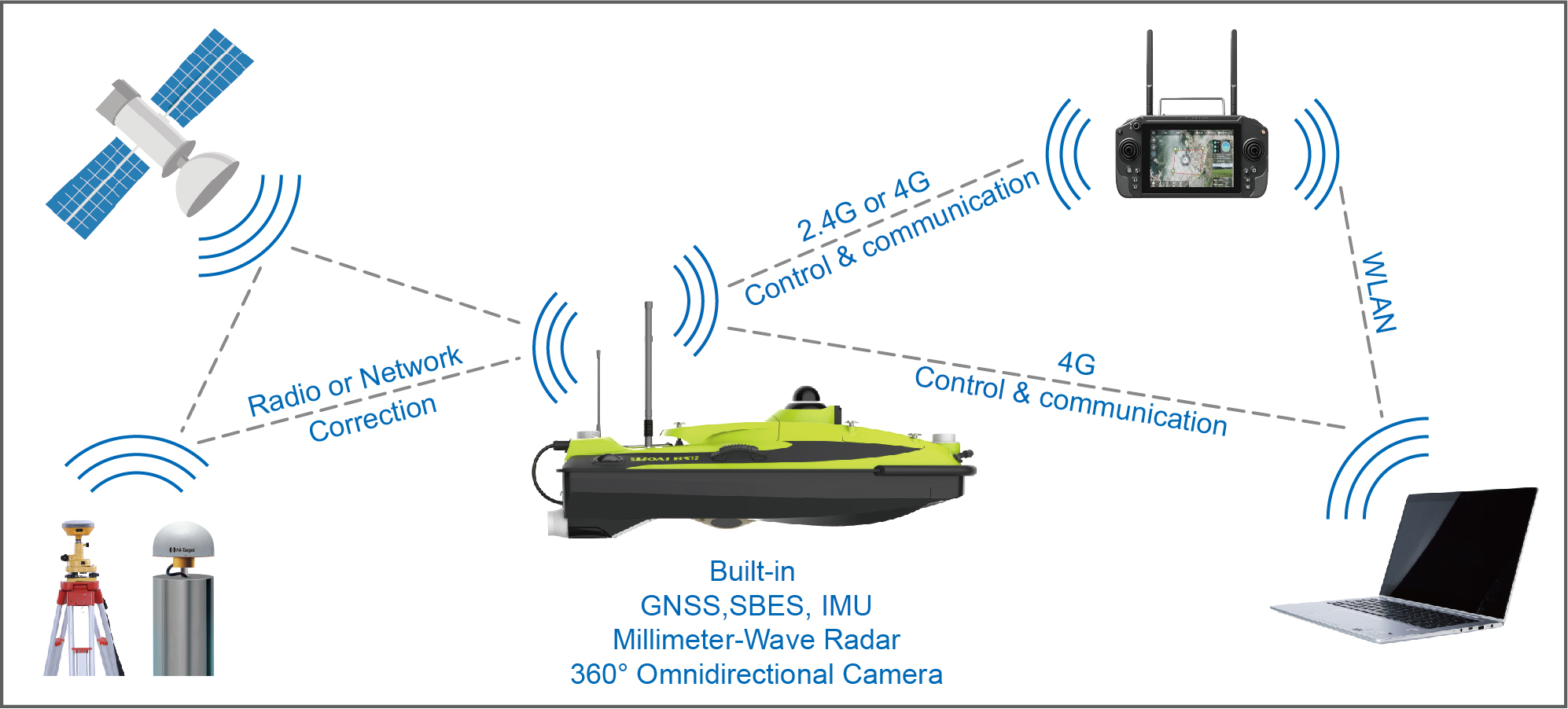
الشكل 3. مبدأ العمل
العملية الميدانية
تم إجراء المسح في بحيرة حضرية تبلغ مساحتها 250,000 متر مربع تقع في منطقة تجارية وسياحية عالية الكثافة في شمال بانكوك. تلعب هذه البحيرة دورًا حيويًا في تنظيم مياه الأمطار والتوازن البيئي للمنطقة. مع تطور مشاريع البناء على طول محيطها، كان الحصول على بيانات طبوغرافية دقيقة تحت الماء أمرًا بالغ الأهمية لكل من تصميم الأساس وتقييمات الأثر البيئي.
بفضل تصميمها المدمج، تم نشر iBoat BS12 مباشرة من المركبة. جعلتها قابليتها للنقل وسرعة إعدادها مثالية للمناطق الحضرية المزدحمة ذات الوصول المقيد.

الشكل 4. نشر iBoat BS12
باستخدام برنامج تخطيط المهام المتكامل مع دعم خرائط Google، حدد فريق المسح خطوط المسح، وفترات التباعد، ومناطق التغطية في غضون 5 دقائق. يسمح البرنامج برسم خطوط ومناطق بديهية، مع ميزات التباعد والتوجيه التلقائي لاستيعاب احتياجات المسح المختلفة.
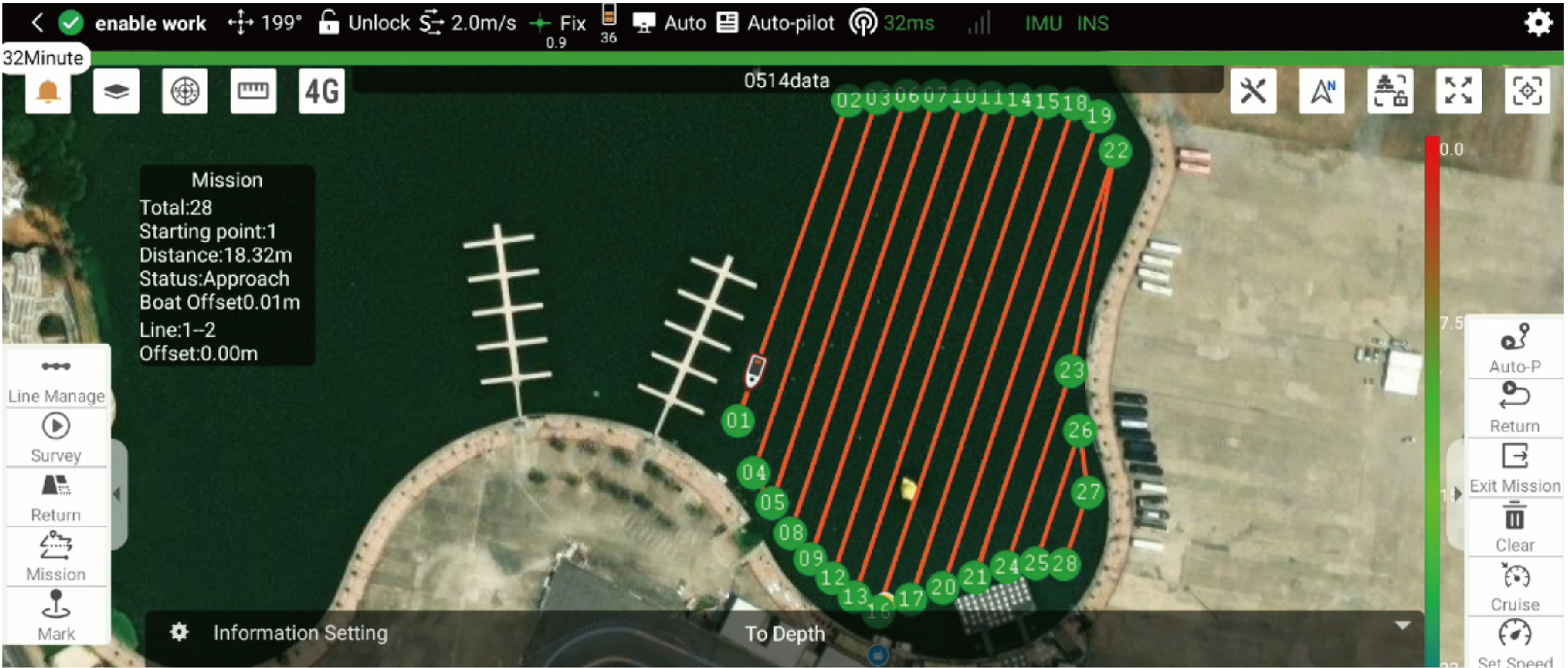
الشكل 5. تخطيط المهام باستخدام واجهة خرائط جوجل
بمجرد تحديد المهمة، بدأت BS12 في الملاحة الذاتية بالكامل، وجمع البيانات الطبوغرافية تحت الماء في الوقت الفعلي على طول مسارها. لم تكن هناك حاجة للتدخل اليدوي - فقد راقب المشغلون ببساطة جمع البيانات من الشاطئ.

الشكل 6. مسح الأعماق الذاتي قيد التقدم
نظرًا لحجم البحيرة، امتدت العمليات لأكثر من يوم واحد. سمحت وظيفة استئناف نقطة التوقف للفريق بإيقاف المسح مؤقتًا في أي نقطة ومواصلة العمل من نفس الموقع بالضبط في اليوم التالي - دون إعادة تهيئة الإعداد أو البيانات.
معالجة البيانات وتصورها
بمجرد الانتهاء من جمع البيانات، تم تنزيل المعلومات من وحدة التحكم عن بعد ومعالجتها باستخدام برنامج HiMAX، وهو برنامج Hi-Target الخاص بالبيانات الهيدروغرافية.
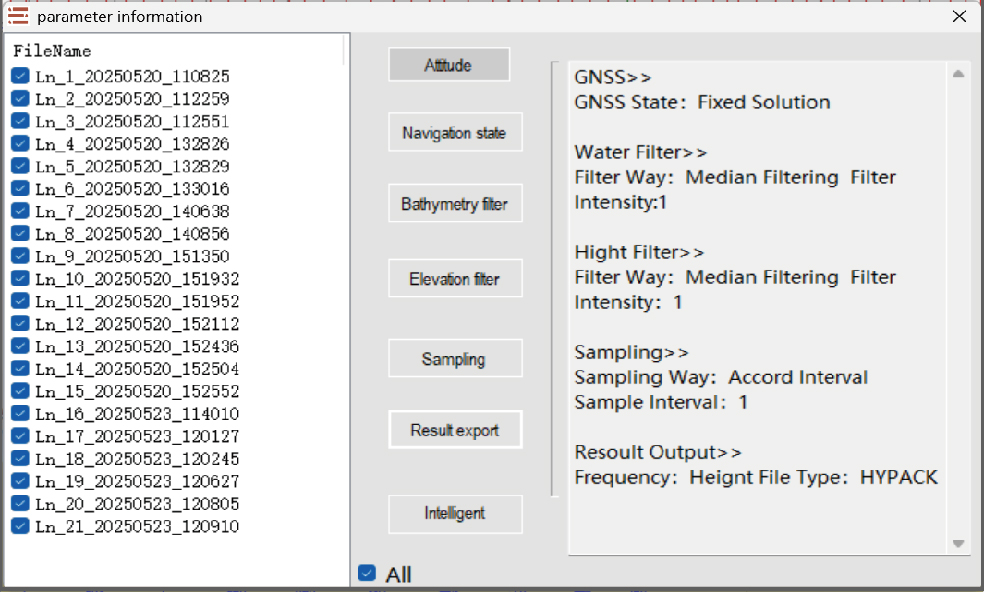
تضمنت سير عمل ما بعد المعالجة الكشف التلقائي عن نقاط العمق الشاذة وإزالتها، وإنشاء خرائط كنتورية بنقرة واحدة لتصور تباين العمق، ونمذجة ثلاثية الأبعاد لتصور مفصل لتضاريس قاع البحر.
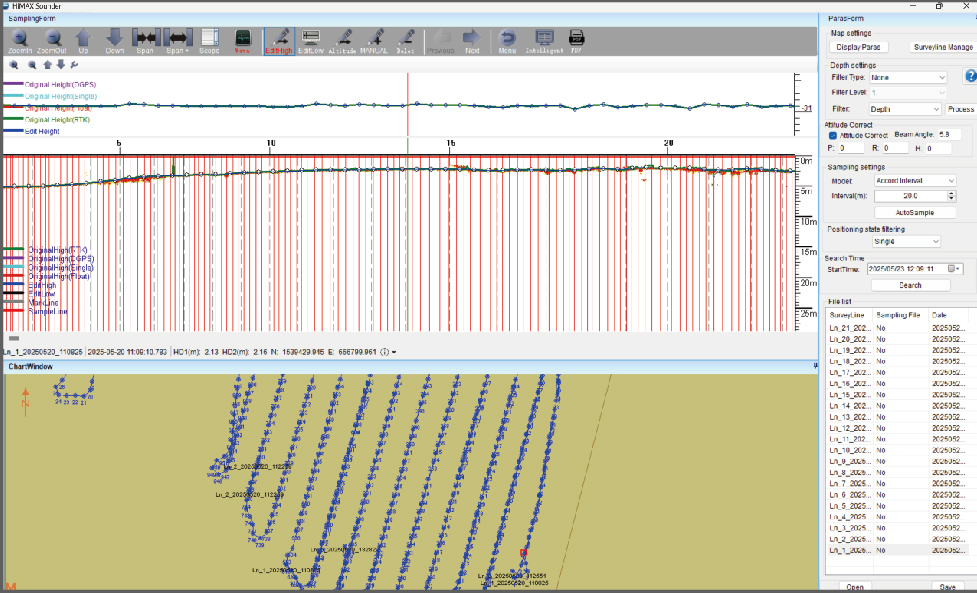
الشكل 7. إزالة الشذوذ في برنامج HiMAX
الشكل 8. خريطة كنتورية للعمق تم إنشاؤها تلقائيًا
أثناء المسح، قمنا أيضًا بجمع مقطع عرضي للتحقق من دقة بيانات قياس الأعماق والتأكد من الامتثال للمواصفات المطلوبة. أثبتت نتائج التحقق أن 95.12% من جميع نقاط البيانات تقع ضمن نطاق الثقة المحدد، مما يؤكد الدقة والموثوقية الفائقتين لمخرجات iBoat BS12.
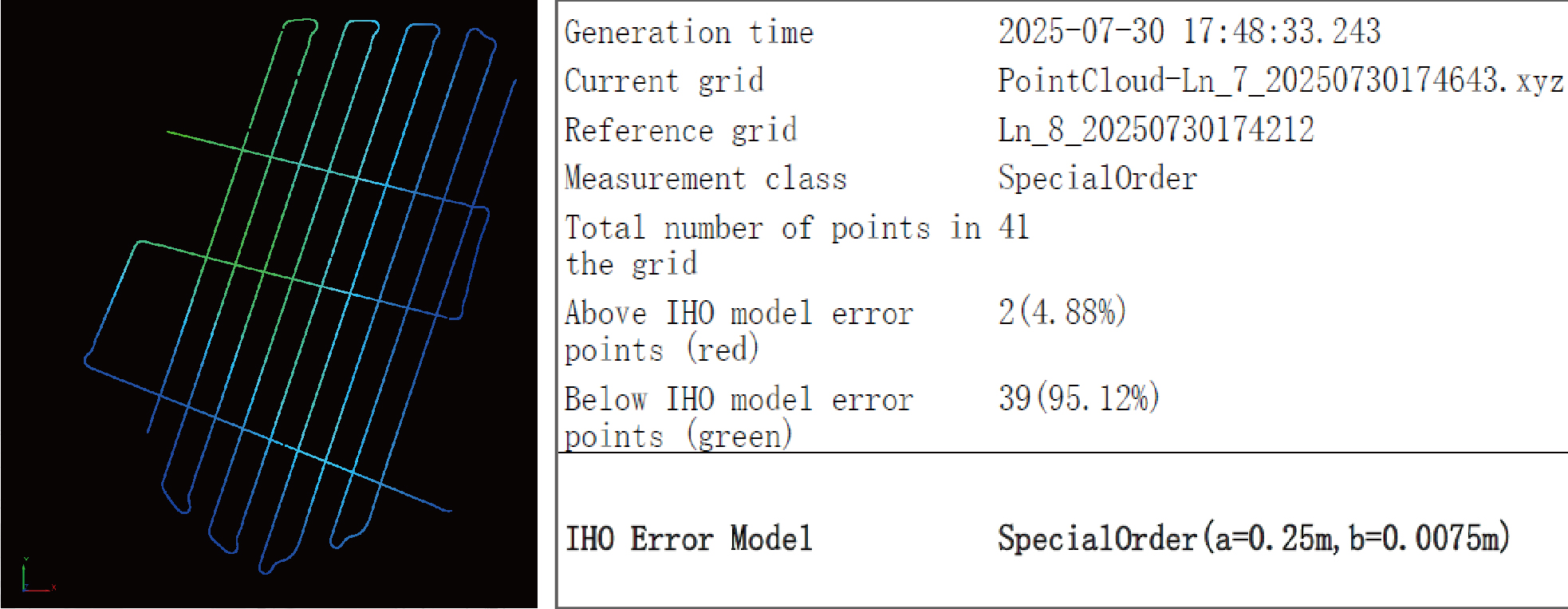
الشكل 9. تحليل التراكب للتحقق من الدقة
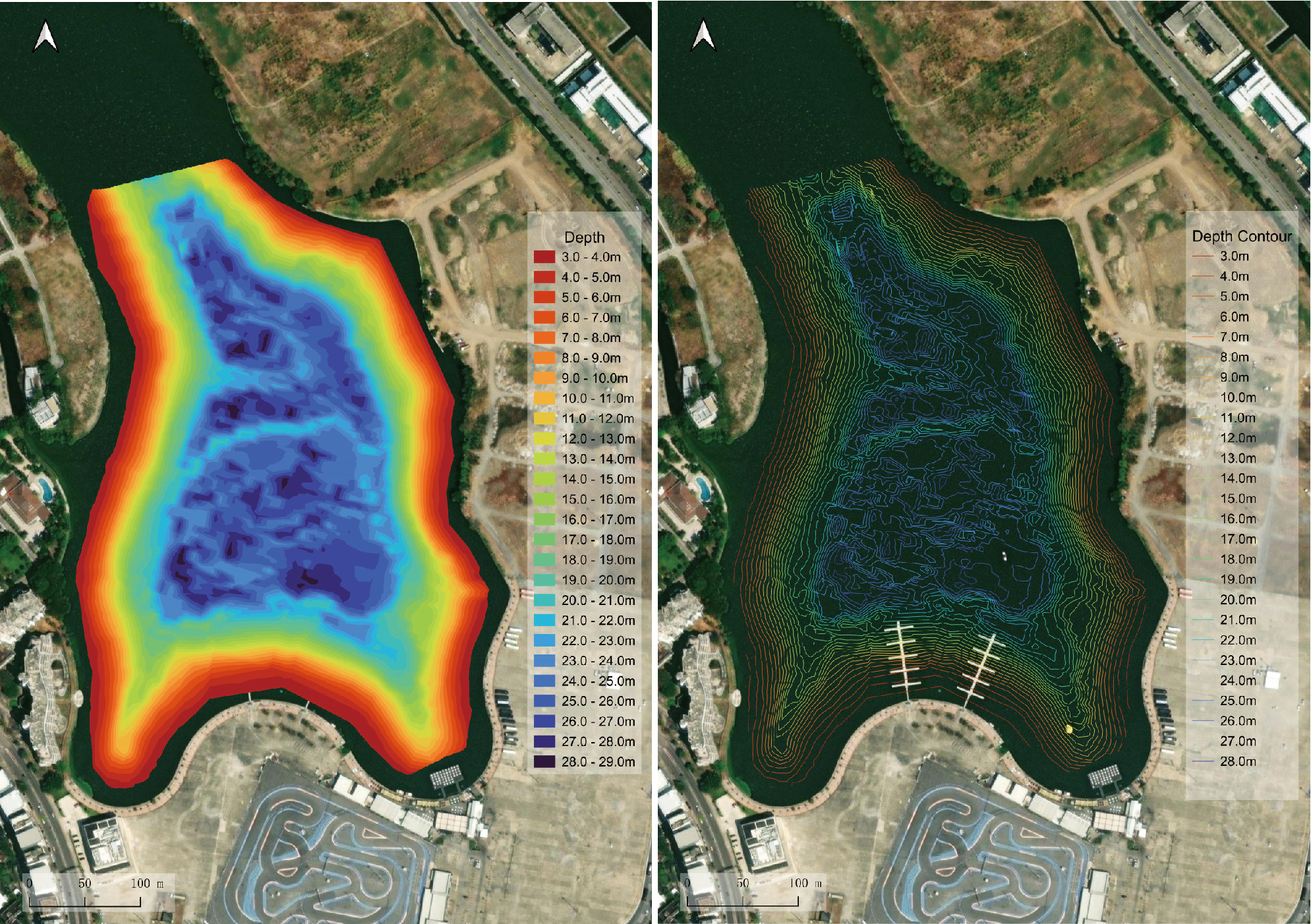
الشكل 10. الخط الكنتوري المرئي للعمق
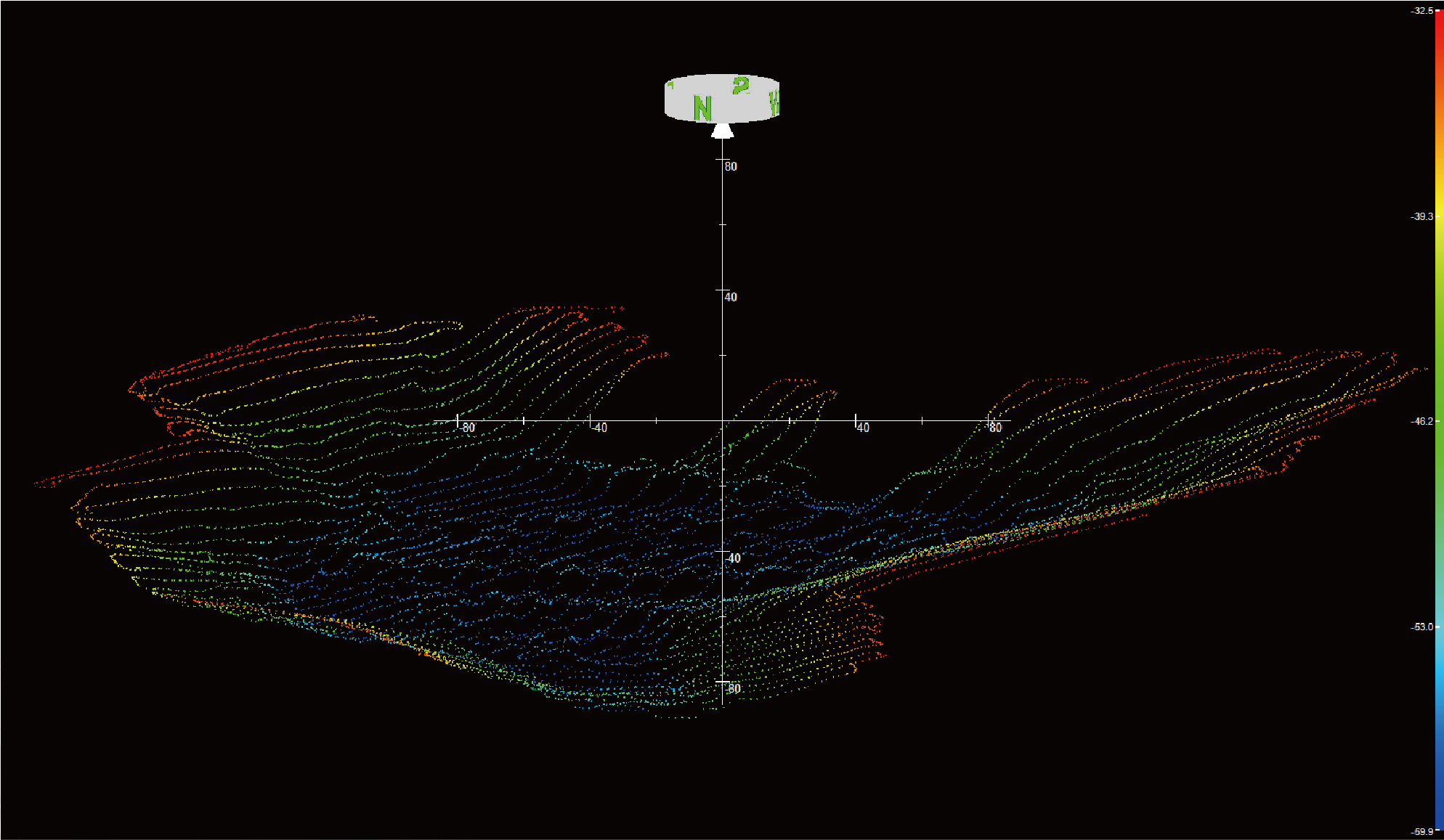
الشكل 11. نموذج تضاريس قاع البحيرة ثلاثي الأبعاد
قدمت هذه المخرجات تمثيلاً واضحًا ودقيقًا لهيكل قاع البحيرة، ودعمًا للتطبيقات اللاحقة مثل تقييم الرواسب، وتخطيط البناء، والدراسات البيئية.
النتيجة والقيمة
نجح المشروع في توفير خريطة طوبوغرافية عالية الدقة تحت الماء لبحيرة حضرية معقدة ومبنية - وهو أمر كان سيكون صعبًا أو يستغرق وقتًا طويلاً أو حتى غير عملي باستخدام القوارب المأهولة التقليدية.
الفوائد الرئيسية:
● نشر سريع وتقليل القوى العاملة
● تشغيل آمن وفعال في البيئات المائية الضيقة أو المزدحمة
● بيانات عمق عالية الدقة مع تكامل سلس في سير عمل ما بعد المعالجة
● قابلية التوسع المذهلة، خاصة لمهام المسح الكبيرة أو المتعددة الأيام
توضح هذه الحالة كيف تعيد iBoat BS12 USV تعريف مسح الأعماق للمياه الداخلية، وتقدم حلاً ذكيًا ومدمجًا لجمع بيانات دقيقة في البيئات الصعبة. تمكن البلديات ومهندسي المدن والمتخصصين البيئيين من اتخاذ قرارات مستنيرة، وتحسين إدارة الممرات المائية والمرونة الحضرية.
نظرة سريعة: مسح بحيرة iBoat BS12 الحضرية


مهام المياه مبسطة. الدقة مُعاد تعريفها.
تعرف على المزيد حول iBoat BS12 وكيف تمكن محترفي الهيدروغرافيا في سيناريوهات العالم الحقيقي.